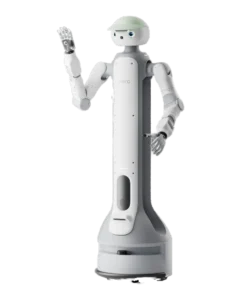
UBTECH Walker S2
Walker S2 is a Level II platform for enterprise environments. Bipedal walking and structured arm manipulation are documented; autonomous task execution without operator oversight is not.
30% weight
25% weight
15% weight
15% weight
15% weight
Will the UBTECH Walker S2 fit your scenario?
Pick what matches your setup. The fit updates as you go.
The full spec sheet.
Within the category, one of the shorter runtimes in the class.
Positions are rank within the 50 humanoid robots in the Robovations database.
Camera-based perception with onboard AI sensor fusion for balance and obstacle response.
The record since launch.
How it holds up after the purchase.
Enterprise-pilot reliability unverified; absence of public failures reflects narrow deployment scale, not proven durability.
Walker S2 in enterprise pilot deployment since late 2022 without documented systematic failures. Firmware cadence not publicly available. Narrow scale prevents broader reliability verification.
Battery charging cycle management; inspect charging contacts for debris or corrosion.
Clean onboard camera lenses and sensor apertures; check joint covers for mechanical wear indicators.
Check for firmware and software updates via UBTECH enterprise interface; inspect actuator housings for unusual resistance or noise.
Full joint and actuator inspection per UBTECH service guidelines; verify sensor calibration against reference targets.
Replace worn end-effector contact surfaces; recalibrate sensors after significant collision events.
What buyers actually ask.
 II
II
Persona AI Gen 1
 II
II
SwitchBot Onero H1
 II
II
EngineAI T800
 II
II
RobotEra Star1
Reference the UBTECH Walker S2 classification.
Embed the Autonomy Ladder™ mark or copy the citation. The mark links back to this assessment and updates if the classification changes.